中文
工业物联网通讯笔记
EtherCAT
思路:使用已有的网络连接透明传输构造EtherCAT帧的报文段。
IGH EtherCAT 开源主站安装及测试
参考 知乎专栏
安装好后可以看到一系列参数 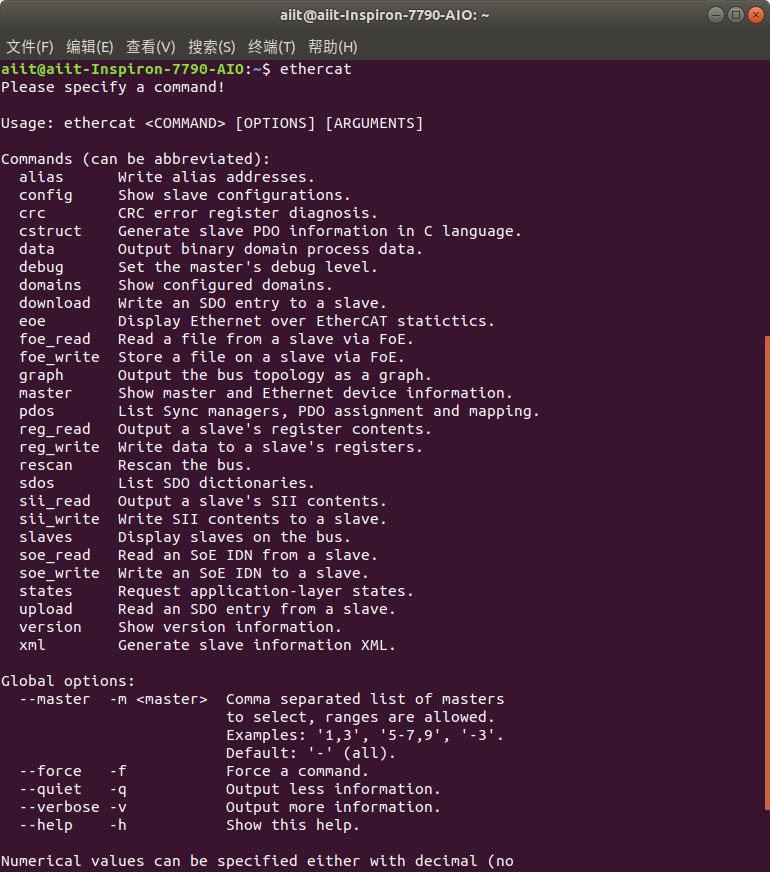
如果开机没自动起来需要手动/etc/init.d/ethercat start。
基于 EtherCAT 的应用
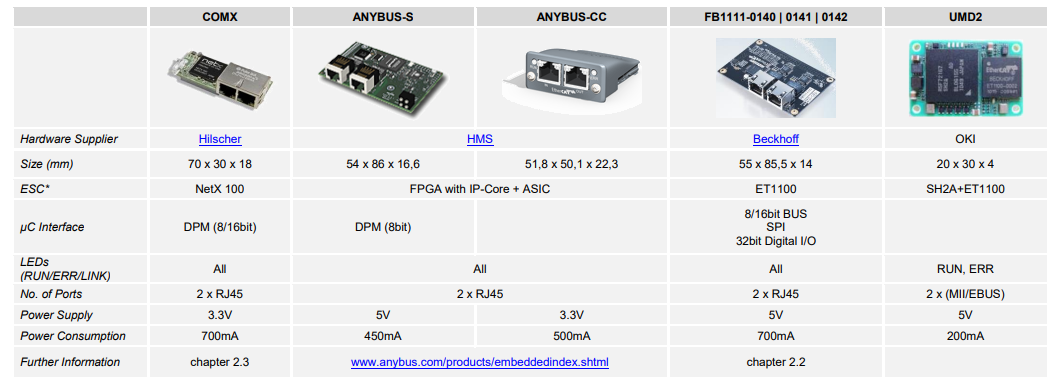
常见 ESC 设备
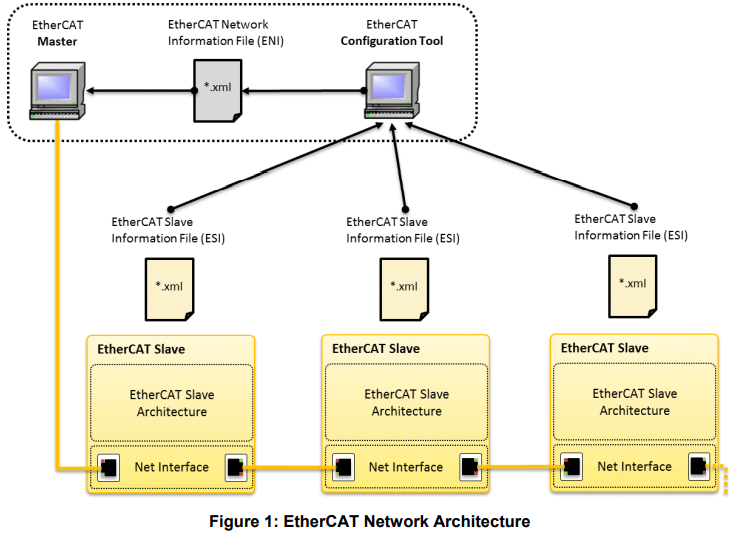
EtherCAT 主从环形架构

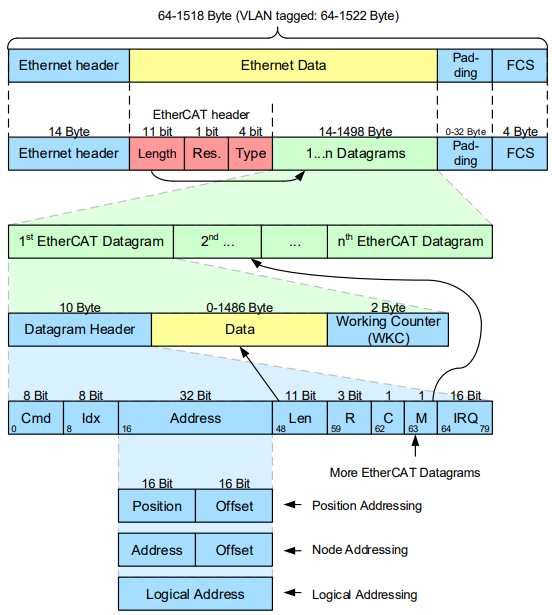
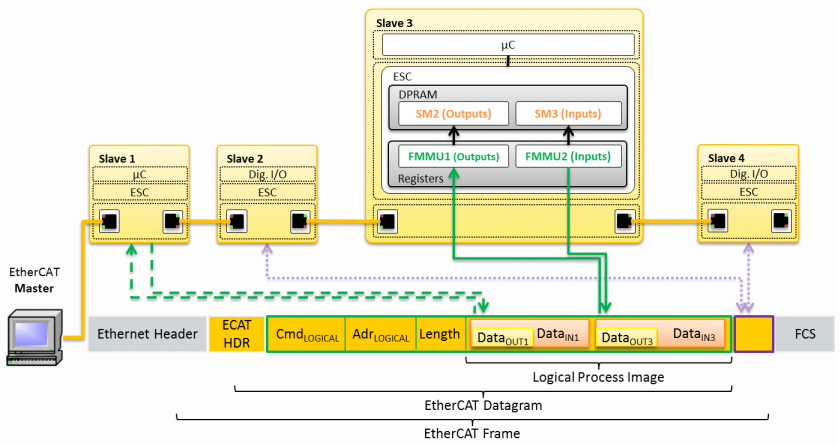
帧结构
状态机
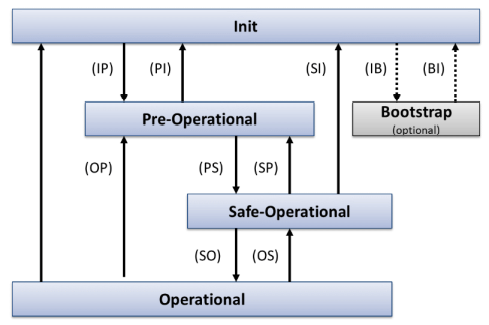
下方介绍的 SOES 库在 esc.h 中定义了状态和状态的转移:
C
#define ESCinit 0x01
#define ESCpreop 0x02
#define ESCboot 0x03
#define ESCsafeop 0x04
#define ESCop 0x08
#define ESCerror 0x10
#define INIT_TO_INIT 0x11
#define INIT_TO_PREOP 0x21
#define INIT_TO_BOOT 0x31
#define INIT_TO_SAFEOP 0x41
#define INIT_TO_OP 0x81
#define PREOP_TO_INIT 0x12
#define PREOP_TO_PREOP 0x22
#define PREOP_TO_BOOT 0x32
#define PREOP_TO_SAFEOP 0x42
#define PREOP_TO_OP 0x82
#define BOOT_TO_INIT 0x13
#define BOOT_TO_PREOP 0x23
#define BOOT_TO_BOOT 0x33
#define BOOT_TO_SAFEOP 0x43
#define BOOT_TO_OP 0x83
#define SAFEOP_TO_INIT 0x14
#define SAFEOP_TO_PREOP 0x24
#define SAFEOP_TO_BOOT 0x34
#define SAFEOP_TO_SAFEOP 0x44
#define SAFEOP_TO_OP 0x84
#define OP_TO_INIT 0x18
#define OP_TO_PREOP 0x28
#define OP_TO_BOOT 0x38
#define OP_TO_SAFEOP 0x48
#define OP_TO_OP 0x88
![]()
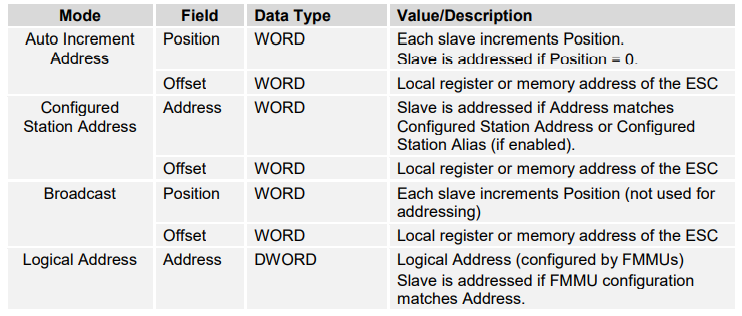
EtherCAT 取址
SOES
开源 EtherCAT Slave 实现,对应有 SOEM 是 EtherCAT Master 实现。 通过配置文件配置 ESC,之后通过 ESC_read 和 ESC_write 与 ESC 交互数据,由 ESC 负责接收发送。这两个函数是硬件相关的,需要针对硬件实现(参考 hal/linux-lan9252 对 lan9252 的实现,rt-kernel-xmc4/esc_hw.h 中 esc_registers 定义,把指针 esc_registers_t * ecat0 指向了 ECAT0_BASE,即寄存器的起始地址)。
SOES 库工作内容
- ESC(EtherCAT Slave Controller)硬件初始化
- ESC 重置
- ESC 初始化,init SPI
- 等待 ESC 初始化成功(轮询 ESC 的 DL 寄存器)
- 软件初始化
- 重置 Slave 状态(覆写 ESC AL 状态寄存器)
- 重置错误信息 (清除 ESC AL 错误码寄存器)
- 中止之前的应用层程序(可能有 SyncManager 在 block,等待接收EtherCAT 包)
- 应用
- 应用层事件(ALevent)处理,ALevent 携带了 ALControl 或 SyncManagers 的更改信息。ALControl 是用来控制状态改变的,SyncManagers 是用来将 EtherCAT 的改动写入到本地内存中的。
- ESC_state 用来处理状态,例如状态变化、错误处理、告知接收到信息。
- Mailbox handler,提供应用层协议使用的 mailboxes。
- 在 mailbox 中,也会检查是否需要使用特定协议的 handler 来处理接收/发送的数据。
SOES 库设计
ecat_slv.c 实现 slave API
全局变量
- 定义全局变量
_ESCvar类型(定义在esc.h中)的ESCvar,负责存储 ESC 状态信息。 - 全局变量
MBX是 Mailbox,存储MBXBUFFERS * MAX(MBXSIZE,MBXSIZEBOOT)规模的uint8_t数据;_MBXcontrol则是 Mailbox 对应的 Controller。 - 全局变量
_SMmap类型的SMmap2和SMmap3分别映射输出、输入的 SM(SyncManager)。
初始化
ecat_slv_init 接收 esc_cfg_t 类型的设置选项进行初始化。
应用处理
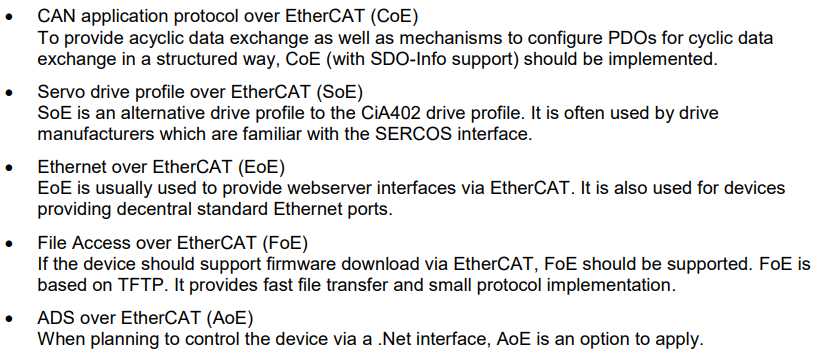
ecat_slv 是一个需要周期性调用的函数,它内部会调用 ecat_slv_poll 和 DIG_process。前者 poll EtherCAT event,检查状态机,检查 SM,检查 Mailbox,如果收到数据就根据编译选项依次检查是否为 CoE(CAN over EtherCAT)、EoE(EtherNet over EtherCAT)、FoE (File over EtherCAT),最后检查是否为 XoE(错误的报文)应用,视需要处理 eeprom;后者更新局部变量,读入收到的 EtherCAT 帧,写出发送帧。
应用相关
DIG_process 会阅读、修改 ESCvar。首先检查是否处于可以修改 Output 信息的的状态下,即 Operational state。
Output:ESC 视角的 Ouput,即用户态的接收
- 如果我们在 OP 状态下,我们能够阅读 3-buffer SM 中被映射到输出的 SM 中的 PDO(Process Data Objects)数据, 默认的是 SyncManager2。我们阅读 SM2 的 ESC RAM 地址,存储到本地。我们将会读入 RXPDOsize bytes 的数据来触发一个完整的 SM 读操作。
- 在局部变量被更新后,我们将本地的 PDO 变量传递到用户应用中。
- 这个函数也包含了 watchdog 机制的实现,如果触发了它,会关闭输出,状态机改变到 Safe Operational。会更新 AlError 信息,告知 Master 发生了错误。
Input:ESC 视角的 Input,即用户态的发送
- 和输出类似,是反过来的,但是更加简单。即使是在 Safe Operational 状态下也会继续更新输入信息。
- 首先阅读用户应用数据,写入到本地的 PDO 变量中。在局部变量刷新后,把他们写入到 Input 对应的 SM,一般是 SyncManager3。这样就可以使用用户应用数据更新 ESC 的 RAM了。
特别需要注意
在实现应用的时候,必须自己定义回调函数 cb_get_inputs 和 cb_get_outputs,这两者声明在 ecat_slv.h 中,会在 DIG_process 中获取输入和输出时分别触发。
esc_cfg_t 设置项中也有定义不同的hook,是可选的。
eep.c
ESI EEPROM 模拟模块。
esc_coe.c
esc_eoe.c
ESI EEPROM 模拟模块。
esc_foe.c
ESI EEPROM 模拟模块。
eep.c
ESI EEPROM 模拟模块。
esc.c
全局变量: ESC_MBX1_sma sm address?(参考ESC_write (ESC_MBX1_sma, MBh, ESC_MBXHSIZE + length);) ESC_MBX1_sml sm length? ESC_MBX1_sme sm end? ESC_MBX1_smc sm controller?
函数: ESC_xoeprocess 负责处理错误的帧。 ESC_read 写 ESC 寄存器。 ESC_write 写 ESC 寄存器。 ESC_ALeventmaskread 读 ALeventMask 寄存器。 ESC_ALeventmaskwrite 写 ALeventMask 寄存器。
ESC_outreqbuffer 从全局的MBXcontrol中寻找请求发送到 outbox 的mailbox 的下标。 ESC_mbxprocess 是实现 mailbox protocol 的,负责 mailbox 的读、发送、重传、mailbox full event 处理。 ESC_writembx将 esc_slv.c 中的全局变量 MBX 中 ESC_outreqbuffer 查询到的 mailbox 发送出去。
mailbox 的状态:
- 0 : idle
- 1 : claimed for inbox
- 2 : claimed for outbox
- 3 : request post outbox
- 4 : outbox posted not send
- 5 : backup outbox
- 6 : mailbox needs to be transmitted again 分别对应宏
C
#define MBXstate_idle 0x00
#define MBXstate_inclaim 0x01
#define MBXstate_outclaim 0x02
#define MBXstate_outreq 0x03
#define MBXstate_outpost 0x04
#define MBXstate_backup 0x05
#define MBXstate_again 0x06
options.h
默认的宏定义。用户程序可以通过定义 ecat_options.h 覆盖他们。
SOES 样例
目录下的 rtl_slave_demo 是一个简短的led亮灯示例。在这个例子中,SOES 相关 API 的应用例子封装在了 void soes (void *arg) 函数中通过一个线程执行,另一个线程去读取 ESCvar.ALstatus 状态和 ESCvar.ALerror 错误码,根据状态机的状态和错误码来点亮 LED,设定闪烁频次。
rtl_lwip_eoe 是一个基于 lwip 的 EtherNet over EtherCAT 示例。mbox_fetch_tmo/mbox_post_tmo 是带 timeout(tmo)的 mailbox fetch/post API。
SOES 中的一些数据规定
SII-PDO 和 ESI-PDO
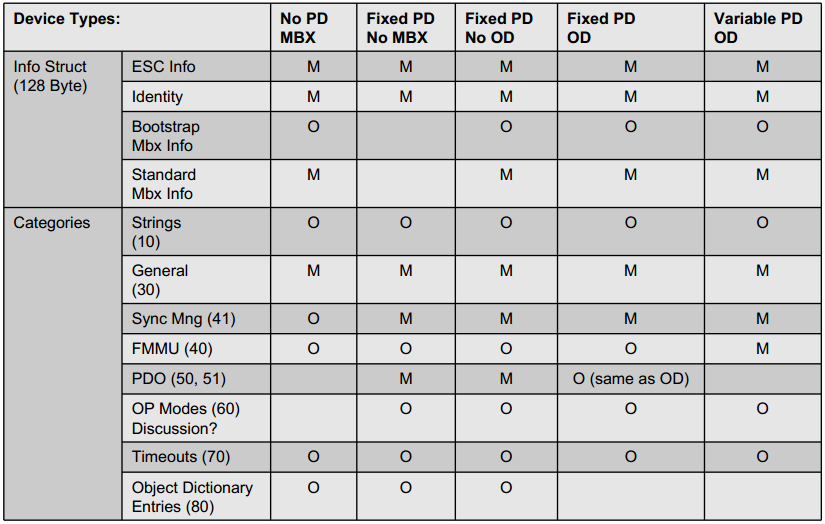
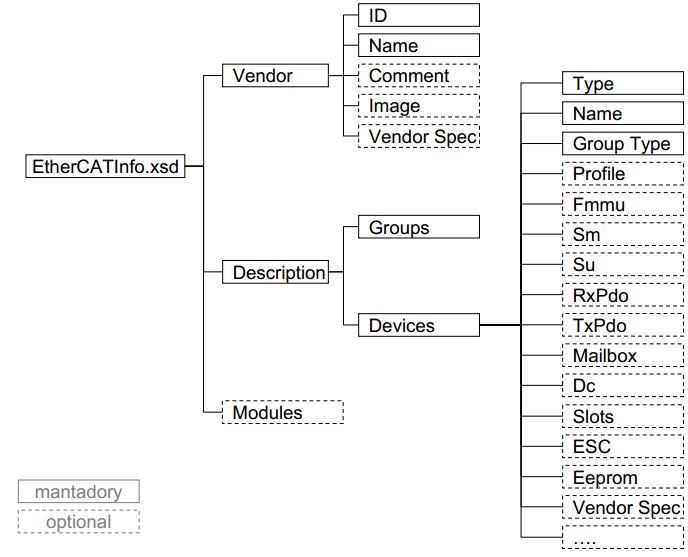
为了通过总线获取 SII-EEPROM(Slave Information Interface)和 ESI(EtherCAT Slave Information, 存储在 SII-EEPROM),规定了相关数据结构。其中:必须的参数,mandatory 用 M 代表;可选的参数,optional 用 O 代表。
OD
同时,对于比较复杂的 Slave 还可以定义可选的 Object Dictionary(OD)。可以在 CoE 中使用它,它遵循 CANopen DS301。
- 0x0000 - 0x0FFF, Data Type Area
- 0x1000 - 0x1FFF, Communication Area
- RxPDO , 0x1600 - 0x17FF
- TxPDO , 0x1A00 - 0x1BFF
- 0x2000 - 0x5FFF, Manufacture specific area
- 0x6000 - 0x6FFF, Input area
- 0x7000 - 0x7FFF, Output area
- 0x8000 - 0x8FFF, Configuration area
- 0x9000 - 0x9FFF, Information area
- 0xA000 - 0xAFFF, Diagnosis Area
- 0xB000 - 0xBFFF, Service Transfer Area
- 0xC000 - 0xEFFF, Reserved Area
- 0xF000 - 0xFFFF, Device Area
SM 事件类型
- 0, Unused
- 1, MailBox Receive, master to slave
- 2, MailBox Send, slave to master
- 3, Processdata output, master to slave
- 4, Processdata input, slave to master
实现
HFA21 支持硬件offloading,上层透明。用透传来写的话,只需要在 UDP datagram 里去构造 EtherCAT 包,当然这样没有 ECS,而且在传输层之上,当作应用层协议来写了,也就不具备快速的on-the-fly能力了。
为了方便做解析,这么写的(具体定义参考上面 EtherCAT 帧结构的图解)
C
#include <stdint.h>
// gcc6 以上支持强制指定大小端(big-endian、little-endian、default)
#define BIG_ENDIAN __attribute__((packed, scalar_storage_order("big-endian")))
#define ETHERCAT_PORT 34980 // 0x88A4
typedef BIG_ENDIAN struct
{
uint16_t type : 4;
uint16_t res : 1;
uint16_t length : 11;
} EcatHeader, *EcatHeaderPtr;
typedef BIG_ENDIAN union
{
BIG_ENDIAN struct
{
uint16_t position;
uint16_t offset;
} position; // Position Addressing
BIG_ENDIAN struct
{
uint16_t address;
uint16_t offset;
} node; // Node Addressing
uint32_t logical;
} EcatAddress, *EcatAddressPtr;
typedef struct
{
uint8_t cmd;
uint8_t idx;
EcatAddress address;
BIG_ENDIAN union
{
BIG_ENDIAN struct
{
uint16_t length : 11;
uint16_t r : 3;
uint16_t c : 1;
uint16_t m : 1; // followed by more datagrams or not
} s;
uint16_t u; // for easy parse
} suffix;
uint16_t irq : 16;
} EcatDataHeader, *EcatDataHeaderPtr;
typedef struct
{
EcatDataHeader header; // 10 bytes
uint8_t *data; // 0-1486 bytes
uint16_t work_counter; // 2bytes
} EcatDatagram, *EcatDatagramPtr;
typedef struct
{
EcatHeader header;
EcatDatagram datagram;
} EcatData, *EcatDataPtr;
用 union 来包裹位域,否则要挨个解析,即依次将相同的数字赋值给占用不同位域的变量,而用了union只需要赋值给对应的 EcatDataHeader.suffix.u。整个强制指定为符合网络序的大端,否则需要手动处理主机序的转换。 比如,假设收到的帧中, EcatDataHeader.suffix 对应的值是0x12345678。 当前可以这么赋值:
C
EcatDataHeader header;
uint16_t suffix = 0x1234;
header.suffix.u = suffix;
printf("%x,%x,%x,%x", header.suffix.s.length, header.suffix.s.r,header.suffix.s.c,header.suffix.s.m);
但是如果
C
typedef struct
{
uint8_t cmd;
uint8_t idx;
EcatAddress address;
uint16_t length : 11;
uint16_t r : 3;
uint16_t c : 1;
uint16_t m : 1; // followed by more datagrams or not
uint16_t irq : 16;
} EcatDataHeader, *EcatDataHeaderPtr;
EcatDataHeader header;
uint16_t suffix = 0x1234;
header.length = suffix;
header.r = suffix;
header.c = suffix;
header.m = suffix;
printf("%x,%x,%x,%x", header.length, header.r,header.c,header.m);
此时还会有大小端的问题,需要用 htonl 等转换。
S7 库
关于 S7,有几篇不错的博客:
The Siemens S7 Communication - Part 1 General StructureThe Siemens S7 Communication - Part 2 Job Requests and Ack Data上面两篇博客的翻译对 ReadSZL 的详解,SZL 是系统状态列表(德语:System-ZustandsListen,英语:System Status Lists),用于描述PLC的当前状态,只能读取不能修改。
注意在 wireshark 中可以用 s7comm 或 tcp.port == 102 来过滤 S7 的包,但是前者只能在展示时起效,后者可以在过滤时起效。
该库是 Siemens 给自家 PLC 写的通讯库,使用时需要指定 IP、port、Rack,Slot。
具体地:
建立连接是用的TSnap7Peer的PeerConnect函数,调用了TIsoTcpSocket的 isoConnect。
s7_isotcp.cpp 里面定义了TIsoTcpSocket的构造函数,设置的Timeout是3000,tcp port是用的102端口。(Rack默认是0,Slot默认是2,我们的设备Slot需要设置成1。)。
发送过去的载荷是在TIsoTcpSocket 的 BuildControlPDU 里构造的 FControlPDU。
Client 的具体的 Operation 都是通过 TSnap7Job 结构体代理的,定义在 s7_micro_client 中。在PerformOperation() 被调用后,就会填充它。
填充方法是,比如TSnap7MicroClient::opGetOrderCode()中,在opReadSZL()中写入到TS7Buffer opData里将 void* 的TSnap7Job::pData 转换成目标类型的.。然后再从这个 TS7Buffer 里读取出来复制到TSnap7Job::pData的各个成员里。
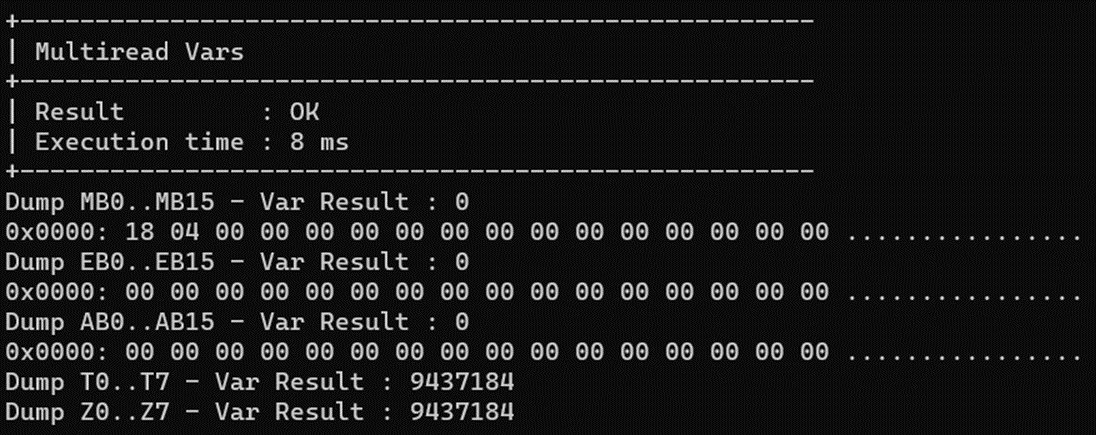
opReadMultiVars/opWriteMultiVars 会自动忽略掉Area不是DB的 DBNumber。把请求的DBNumber都填充到ReqParams里,随着首部PS7ReqHeader TSnap7Peer::PDUH_out 作为PDU的数据单元。
opDBGet/opDBFill 调用了 opReadArea/opWriteArea。
所有的operation都是通过PerformOperation()去管理的,而每个operation中,都是通过TIsoTcpSocket::isoExchangeBuffer来完成的发送和接收,这个函数可以接收data来修改发送出去的PDU.payload,如果接收了空指针(一半都会传入0),则会使用默认的 PDU.payload。
接收到的数据会存储到ResData中,并复制到Target结束(Target是Job.pData偏移后 byte 类型的指针)。
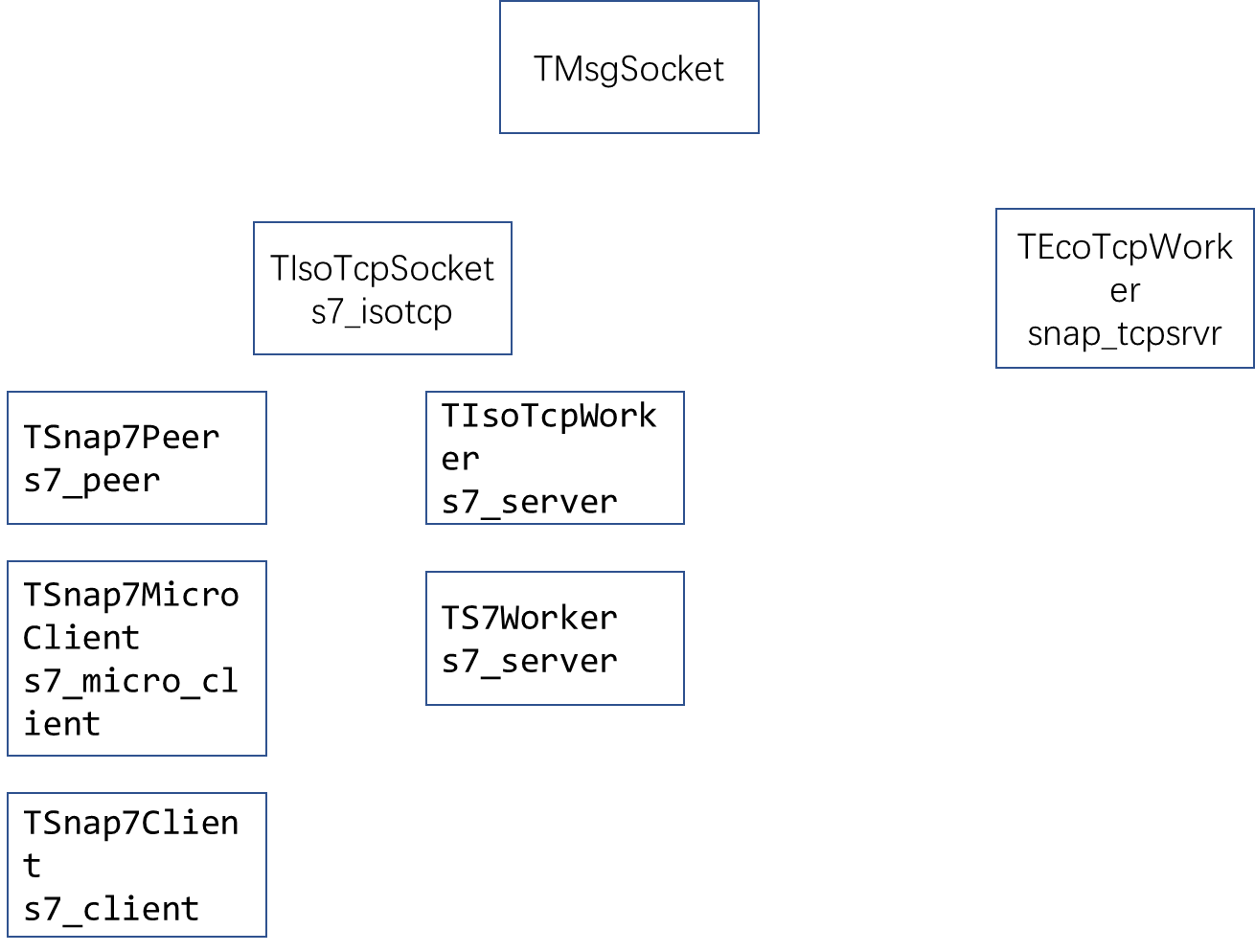
主要类的继承关系:
测试情况: